SDPS2011
Usage of RSSI value for Extension of Robot’s Operation Range
Cengiz Togay and Utku Bayram
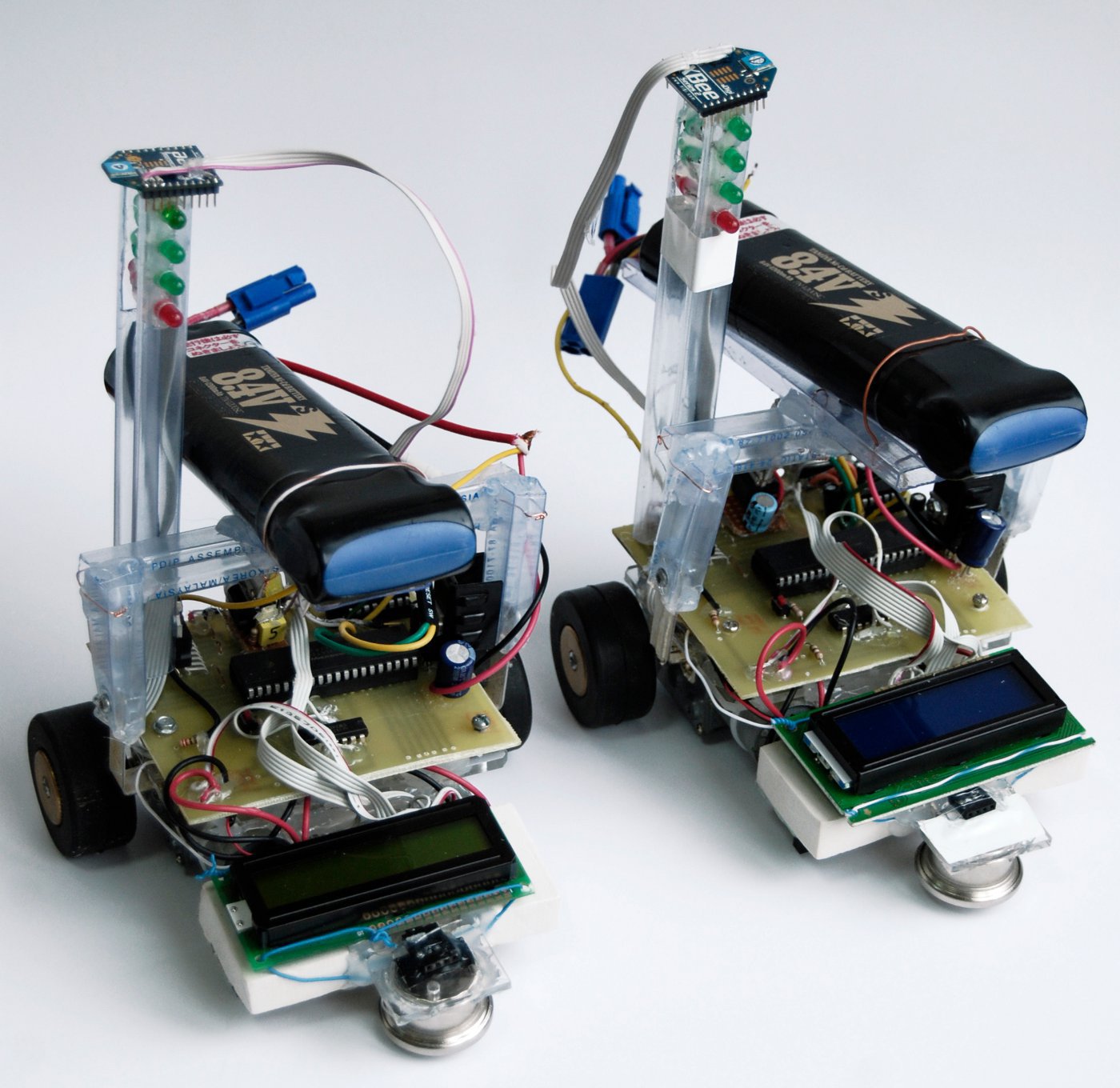
Abstract—In this paper, we present a method utilizing router(intermediary) robots to provide communication continuously between a base station and an explorer robot. In this case, the explorer robot is controlled by a base station. Our aim increases the operational range of the explorer robot through router robots which transmit messages between the base station
and the explorer robot. Fully automated router robots carry ZigBee modems and move between the base station and the explorer. The router robots form a straight chain and each router robot’s modem is connected consecutively to other modems. Router robots decide to move forward or backward considering the Received Signal Strength Indicator values of messages between ZigBee modems.
Keywords-Wireless Networks, Router Robots, ZigBee Modem
Anasayfaya Dön Güncel Haberler Haber Arşiv
